
研究成果詳細
人混みでも環境地図を学習して稼働する自律移動ロボットを開発
要約
東京工業大学像情報工学研究所の長谷川修准教授らは,大勢の人が動き回っている場所でも人や障害物にぶつからずに最短経路で目的の場所に移動する自律移動ロボットを開発した。環境変化に影響されにくい画像の3次元特徴とロボット車輪の回転情報から周辺の地図をつくる技術を用いて実現した。従来,人混みのような変動要因の大きな環境で移動ロボットを稼働させるには,あらかじめ床に誘導ラインを引くといった事前の作り込みが必要だった。このロボットではその必要がなく,こうした自律移動ロボットは世界的にも例がない。
研究の内容,背景,意義,今後の展開等
【概要】
東京工業大学像情報工学研究所の長谷川修准教授らは,大勢の人が動き回っている場所でも人や障害物にぶつからずに最短経路で目的の場所 に移動する自律移動ロボットを開発した。環境変化に影響されにくい画像の3次元特徴とロボット車輪の回転情報から周辺の地図をつくる技術を用い
て実現した。従来,人混みのような変動要因の大きな環境で移動ロボットを稼働させるには,あらかじめ床に誘導ラインを引くといった事前の作り込みが必要だった。このロボットではその必要がなく,こうした自律移動ロボットは世界的にも例がない。
今回の技術開発により,人の日常的な生活環境で,活動場所を限定せず,人を助ける知能ロボットの実現に向け一歩前進した。新技術を搭載したロボットは,家庭,公共施設,医療,サービス業,製造業,流通業などの幅広い分野での利用が期待される。
この成果は22 日から名古屋工業大学で開かれる第28 回日本ロボット学会学術講演会で発表する。また29 日から東京国際フォーラムで開かれるイノベーションジャパン2010 ではロボットの実機を展示し,新技術の詳細を説明する。本研究はNEDO の「産業技術研究助成事業(若手研究グラント)」の助成を受けて実施された。
●研究の背景
急速に少子高齢化と人口減少が進む我 が国では,将来の労働力の確保と,国際競争力を有する新たな基幹産業の創出が急務である。経済産業省が2010 年6 月にまとめた「産業構造ビジョン2010」によれば,今後我が国の産業構造は自動車産業依存から大きく転換し,「戦略5分野」で稼がねばならないとしてい る。
この5分野のうちの一つが「先端技術分野」であり,その中で「先端ロボット」の市場規模は,10 年後の2020 年に現在の3 倍の3 兆円,2035 年には9 兆円が見込まれている。ここで成長が最も期待されているのが人の生活環境で働くロボットであり,その実現にはロボットの頭脳にあたる,知能ソフトウエア技 術の一層の向上が不可欠とされる。今回の新技術は,そうした知能ソフトウエア技術の発展に寄与するものである。
●研究の経緯
近 年のロボット産業の発展に伴い,警備ロボットや介護ロボットなどの,自律移動ロボットの導入が期待されている。一般に,移動ロボットが自律的にナビゲー ションを行うためには,障害物の位置情報などを表した地図が必要となる。未知の環境で移動ロボットが自律的に地図構築・自己位置推定を行う問題は SLAM(Simultaneously Localization And Mapping) と呼ばれており,従来から広く研究されてきた。しかし従来のシステムでは,駅構内やショッピングモールのようにたくさんの人が入り乱れている環境下では, 安定した地図構築・自己位置推定ができなかった。
●今回の研究の内容
本研究では,複数の画像データから安定した特徴点を取り出すことで,たくさんの人が存在する混雑した環境下でオンライン・追加的に地図構築・自己位置推定を行い,さらにはロボットが地図中の任意の位置に自律的に移動することを可能とした。
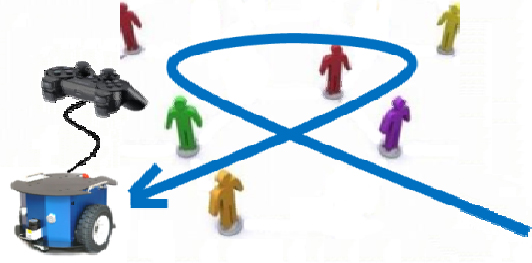
本研究ではセンサとして単眼全方位カメラと車輪のエンコーダを用いて地図構築・ナビゲーションを行う(図2)。また環境として駅構内やショッピングモール のような,たくさんの人が入り乱れている混雑な環境を想定する。そのような混雑な環境下では人などが常に動いているため,特徴点の対応付け・位置計測が難 しく,SLAM を行うのは極めて困難である。そこで本研究ではカメラから得られる特徴量として,人の多い混雑な環境下でも安定して得られる3 次元上の特徴点(図3)を用いることで,混雑な環境
下でロバストにSLAM・ナビゲーションを行う手法を開発した。
●本研究で得られた結果・知見
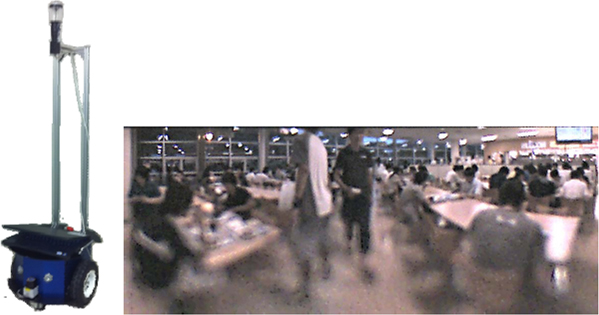
実験は20m×20m 程度の屋内環境(図1) で行った。この環境は東工大すずかけ台学生食堂であり,常に多くの人が出入りし,混雑している。このような常に人がいる環境の場合,従来の手法では動いて いる人から抽出される特徴点が悪影響を与え,ロバストにSLAM・ナビゲーションを行うことができなかった。これに対し本手法では,混雑な環境下でもロバ ストにSLAM・ナビゲーションを行えるという特長がある。
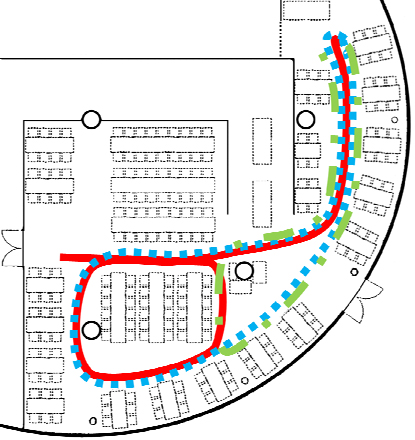
まず学習フェーズでは,全方位カメラとエンコーダセンサを搭載したロボットが人間の 操縦によって,提案手法を用いて自己位置推定と地図構築を行いながら移動する。図4は環境の真値地図と,学習フェーズでロボットを移動させた道順を表して おり,まず左下の赤い実線で示した小さいループを2 周,次に右上に移動し,そこから青の点線で示した大きなループを2周。最後に右上の緑の一点鎖線で示した小さいループを2周させた。
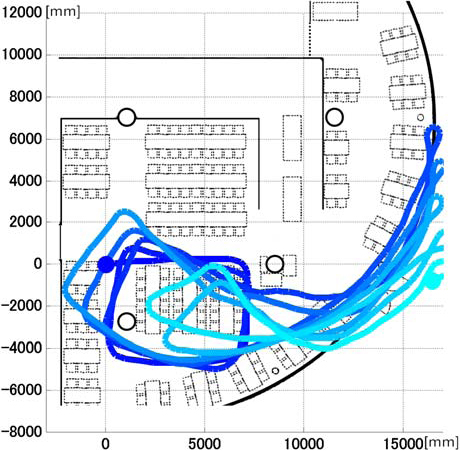
図5は,図 4の軌跡をカメラの画像情報を使わずオドメトリ(ロボットの車輪の回転角の情報)だけで学習した結果である。図5において,青色の丸はスタート地点,水色 の丸はゴール地点を表しており,ルートはスタート地点から徐々に色が薄くなるように描かれている。この図から,オドメトリのみから計測した場合には,同じ 場所を何度も通っているにもかかわらず,徐々に自己位置推定の誤差が溜まり,軌跡の形が崩れる様子が観察できる。
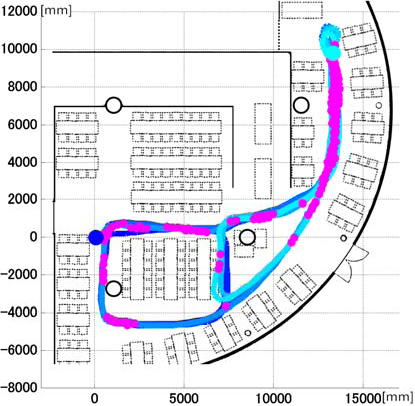
これに対し,図6は提案手法に よりロボットが学習した軌跡である。図6において,赤い丸は過去に訪れたことがあると認識(Loop-Closing 検出) された位置を表している。この図から,画像情報を併用することで誤差が補正され,ルートを正しく学習出来ていることが分かる。
次にナビゲーショ ンフェーズでは,学習フェーズで学習した軌跡に沿うように,ロボットを自律的に移動させた。今回は図の左下から右上まで移動するように経路計画を行わせ た。図7にロボットが自律的に移動した実際の軌跡を示す。ここで,学習フェーズで学習した軌跡をグレーのライン,ロボットが実際に移動した軌跡を青のライ ン,また学習フェーズで学習した軌跡に対してLoop-Closing 検出がされた位置を赤丸で示している。この図から,ロボットは学習フェーズで学習した地図の,左下から右上に至る経路に沿うように自律的に移動し,ゴール 地点まで到達できていることがわかる。
●研究の今後の展開・波及効果
本研究では,人の多い混雑な環境下でロバストにSLAM・ ナビゲーションを行う手法として,画像から得られる,人の多い混雑な環境下でも安定な特徴点を用いてSLAM・ナビゲーションを行う手法を提案し,多くの 人が常に映りこんでいる状況下でも安定してSLAM・ナビゲーションが行えることを確認した。
本研究により,人の日常的な生活環境で,活動場所 を限定せず,人を助ける知能ロボットの実現に向けて,また一歩前進したといえる。新技術を搭載したロボットは,将来,家庭や公共施設,医療,サービス業, 製造業,流通業などの幅広い分野で利用が想定される。なお本手法は2 輪の移動ロボットだけでなく,車やヒューマノイドなどにも適用可能である。
【本事業の発表先と発表日】
第28 回日本ロボット学会学術講演会(名古屋工業大学) 2010/09/22
論文: “人の多い混雑な環境下でのSLAM による移動ロボットのナビゲーション”
著者: 森岡博史,李想揆,Tongprasit Noppharit,長谷川修

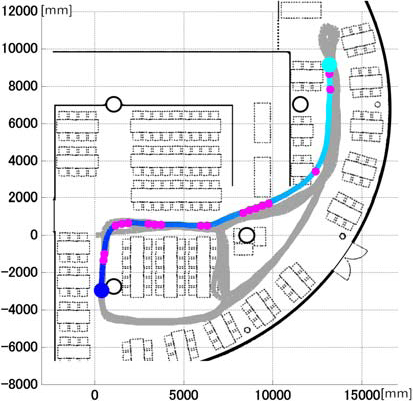 |
| 図7:提案手法のナビゲーションフェーズでのロボットの軌跡。図6の地図の学習結果に基づき,実際にスタート地点からゴール地点までかなり正確に自律移動できた。 |
| 本件に関するお問い合せ先 |
|
|---|---|
| TEL | |
| FAX | |
| URL |
*6年以上前の研究成果は検索してください
![]()
- 大岡山キャンパス
- 〒152-8550 東京都目黒区大岡山2-12-1

- すずかけ台キャンパス
- 〒226-8503 神奈川県横浜市緑区長津田町 4259
- 田町キャンパス
- 〒108-0023 東京都港区芝浦3-3-6
Copyright (C) Tokyo Institute of Technology. All rights reserved.